Autonomous Arduino Car – 2017
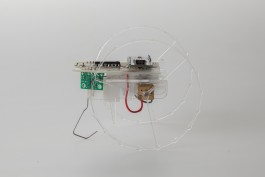
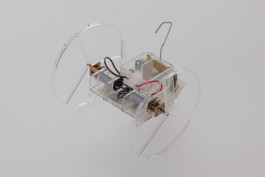
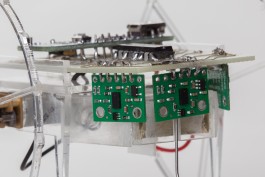
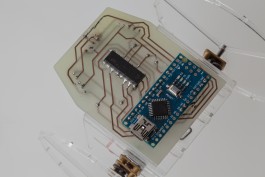
During the technical design class and exercise, we had to develop, program and design an autonomous vehicle. The aim was to make it as light and fast as possible, without compromising its autonomous capabilities to get through the pre-established course. With three laser time-of-flight sensors the distances to the front and sides where measured and were the foundation for navigation. An Arduino Nano was used to take input from the sensors and outputting commands to the L-293D component on the CNC-machined circuit board, which controlled the motor’s power and therefore speed and direction of the vehicle. The total weight including two 6V batteries was 78 grams.